Savonia Article Pro: Indoor Navigation with Ultra‑Wideband Iiwari Technology, 5G and AI – Part 1 of 2
Savonia Article Pro is a collection of multidisciplinary Savonia expertise on various topics.
This work is licensed under CC BY-SA 4.0![]()
![]()
![]()
Motivation and UWB rationale
Series: Part 1 → Part 2
https://www.savonia.fi/savonia-stage/savonia-stage-indoor-navigation-demo-autotie/
This article describes how we built a system to demonstrate the potential of ultra-wideband (UWB) technology for indoor navigation of a mobile robot. The core of the solution is Iiwari Ultra‑Wideband (UWB) positioning combined with a custom navigation controller and a 5G‑connected AI obstacle detection model. The navigation software and integration work were designed and implemented as part of the AuToTIE project.
The demonstration video follows one full mission: the robot starts from its home position, visits three tables (A, B and C), waits briefly for new goals, and then returns. On the way back, a quadruped robot crosses in front of it. A 5G‑connected AI model detects the obstacle, pauses the Dingo, and allows it to continue only when the path is clear.
1. Why UWB – and not only LiDAR and a full ROS navigation stack?
The real-world challenge is simple to describe yet difficult to solve: achieving reliable localisation for a robot operating within a large, multi-floor, multi-building environment, and leveraging that context for safe navigation. Conventional indoor positioning systems provide coverage only within limited zones, but our use case required continuous, building-scale situational awareness. This localisation needed to remain highly stable in dynamic campus environments, allowing the robot to navigate close to workstations while safely responding to people and sudden obstacles.
Outdoor robots often rely on satellite positioning, but GPS signals are ineffective inside buildings. Wi-Fi or Bluetooth positioning is possible, but their accuracy is typically on the order of metres and prone to interference from crowds and infrastructure. We needed position information that was precise, stable, and repeatable within complex university corridors—a level of absolute global consistency that local LiDAR-based SLAM alone cannot guarantee across multi-building spaces.
Why UWB fits this scenario
Ultra-Wideband (UWB) is a radio technology that transmits extremely short pulses, measures their time-of-flight to fixed anchors, and computes the position using the Time Difference of Arrival (TDoA) method. This enables decimetre‑level indoor positioning even in cluttered environments, as several recent surveys on indoor localisation have reported (Zafari, Gkelias and Leung, 2019; Hayward et al., 2022; Che et al., 2023). UWB has been widely discussed as a strong candidate for accurate indoor localisation thanks to its timing‑based ranging, robustness to multipath and relatively modest infrastructure cost compared to camera‑based systems.
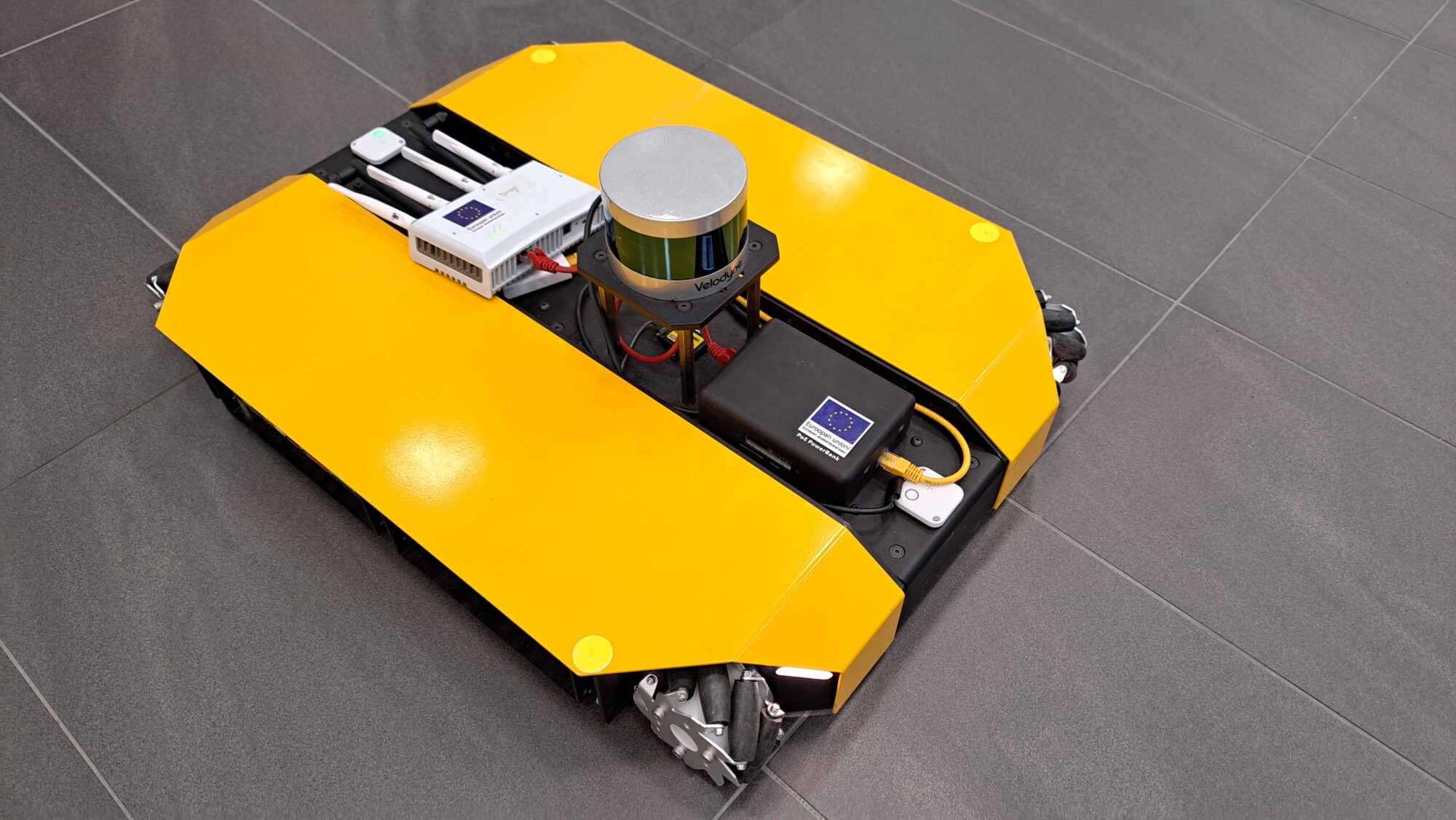
In our setup we mounted two Iiwari UWB tags on the Dingo – one in the front and one in the back. The dual-tag configuration provides a robust estimate of the robot’s global position (x, y). While dual tags can be used to calculate heading, we relied on fused odometry for smoother rotation, using UWB primarily for position (x, y). The Iiwari system applies its own Kalman filtering and delivers coordinates at around 10 Hz with typical noise on the order of ±20 cm, which are then fed into our navigation node running on ROS Noetic.
This design gives us a
Why not only LiDAR + full ROS navigation?
The Clearpath Dingo‑D can also run a conventional LiDAR‑based ROS navigation stack (SLAM, AMCL, costmaps and local planners). LiDAR‑based navigation is powerful and very mature in the research literature (e.g. Saha and Dhara, 2024), but it also has some practical drawbacks for this specific project:
• It requires careful mapping and tuning of costmaps, inflation layers and local planners for each environment.
• Glass walls, reflective surfaces, chair legs and table edges can create noisy point clouds that require extra filtering and expert setup.
• The resulting map and parameters are environment‑specific moving the robot to a new floor or building can mean starting almost from scratch.
• Our focus in AuToTIE was to evaluate and demonstrate Iiwari UWB as the primary positioning method for indoor automation, not to optimise a full LiDAR‑SLAM pipeline.
For these reasons we deliberately built a lightweight, UWB‑centric navigation stack. LiDAR and vision still appear in the system through the separate AI obstacle detection model, but the main source of truth for where the robot is comes from UWB. This keeps the architecture simpler, easier to explain in teaching, and more transferable between different rooms that share the same UWB infrastructure.
Finally, we wanted the system to be safe in dynamic situations. For this, we integrated an AI model (5G:llä vauhtia digitalisaatioon – Pohjois-Savon liitto, REACT-EU EAKR: A77467) that looks for obstacles and communicates with the robot over a Nokia 5G connection. The same model runs noticeably more slowly over standard Wi‑Fi, but with 5G the control loop remains smooth and responsive in practice.
Next: Part 2 of 2 — System architecture (tags → trajectory), algorithms & control logic, conclusion, and references.
Authors info: Md Al-Naim, md.al-naim@savonia.fi, Asmo Jakorinne, asmo.jakorinne@savonia.fi
Supervised by: Premton Canamusa (Savonia UAS), Asmo Jakorinne (Savonia UAS), and Teemu Lätti (Iiwari Tracking Solutions)
Developed by: Md Al-Naim (Savonia DigiCenter North Savo)
References:
Che, F., Ahmed, Q.Z., Lazaridis, P.I., Sureephong, P. and Alade, T. (2023) ‘Indoor Positioning System (IPS) using Ultra‑Wide Bandwidth (UWB)—For Industrial Internet of Things (IIoT)’, Sensors, 23(12), 5710.
Hayward, S.J., van Lopik, K., Hinde, C. and West, A.A. (2022) ‘A survey of indoor location technologies, techniques and applications in industry’, Internet of Things, 20, 100608.
Zafari, F., Gkelias, A. and Leung, K.K. (2019) ‘A Survey of Indoor Localization Systems and Technologies’, IEEE Communications Surveys & Tutorials, 21(3), pp. 2568–2599.
Saha, A. and Dhara, B.C. (2024) ‘3D LiDAR‑based obstacle detection and tracking for autonomous navigation in dynamic environments’, International Journal of Intelligent Robotics and Applications, 8, pp. 39–60.
5G:llä vauhtia digitalisaatioon’, Pohjois-Savon liitto, REACT-EU EAKR: A77467.
Project: Automaatio- ja Tekoäly Tiedoksi -hanke (AuToTIE), Pohjois-Savon Liitto, EAKR
Robot Platform: Clearpath Dingo-D
Location: Savonia UAS DigiCenter North Savo

