
Savonia-artikkeli Pro: Tuotannon sisälogistiikan simulointi
Savonia-artikkeli Pro on kokoelma monialaisen Savonian asiantuntemusta eri aiheista.
This work is licensed under CC BY-SA 4.0![]()
![]()
![]()
Kun tuotantoon ollaan hankkimassa mobiilirobottia, kartoitustyössä tulee huomioida, mahtuuko robotti liikkumaan tuotantotilassa, riittävätkö käytävien leveydet, mihin työt voidaan jättää odottamaan ja miten materiaalivirta vaikuttaa tuotannon läpimenoon. Tätä voidaan selvittää simuloimalla ennen investointipäätöksiä.
Tässä artikkelissa esitellään tiivistetysti tehtyä sisälogistiikkaan liittyvää, todelliseen yritystapaukseen liittyvää, simulaatioprojektia, jossa tutkittiin simulaatiomallien avulla mobiilirobottien toimivuutta yrityksen tuotannossa.
Tutkittavia asioita oli ahtaiden käytävien vaikutus mobiilirobotiikkaan ja sen valintaan sekä oikealla tuotantodatalla tehdyt simulaatioajot mobiilirobotin käyttöasteen selvittämiseksi. Lisäksi simulaatiomalleissa tutkittiin mobiilirobottien noutopisteiden määrän vaikutusta tuotannon läpimenoon.
Projektin tarkempi ja teknisempi kuvaus on tehty Savonian julkaisusarjaan, jonka linkki löytyy artikkelin lopusta. Julkaisut ja yritystapaus ovat osa Savonia-ammattikorkeakoulu Oy:n Simulaatiomallit teollisissa prosesseissa -hanketta, ja tämä artikkeli on yksi hankkeessa tuotettavia simulaatiomalleihin liittyviä toimintamalleja.
Lähtötiedot
Projektin tavoitteiden täyttämiseksi tarvittavia lähtötietoja oli tuotannon layout ja tuotantodata. Simulaatiomallien rakentamiseen saatiin yrityksen tehtaan 2d-layout, jonka pohjalta tehtiin 3d-simulaatiomallit kahdelle simulaatio-ohjelmistolle.
Simulointeihin saatiin tuotantodataa 4 viikon ajalta. Saadut datat olivat kone- ja viikkokohtaisesti excel-tiedostoissa. Yhteensä lähtödata excel-tiedostoja oli 26 kpl. Simulointimalleja varten näistä tehtiin yhteenveto excel, jossa lähtödata jaettiin viikkokohtaisiin välilehtiin.
Simulaatiomallit
Tässä projektissa tehtiin simulaatiomallit kahdella eri simulaatio-ohjelmistolla, FlexSim ja Visual Components -ohjelmistoilla. Kahden simulaatio-ohjelmiston käyttö mahdollisti erityyppisten simulaatioiden luonnin. [HJ2.1][MK2.2]
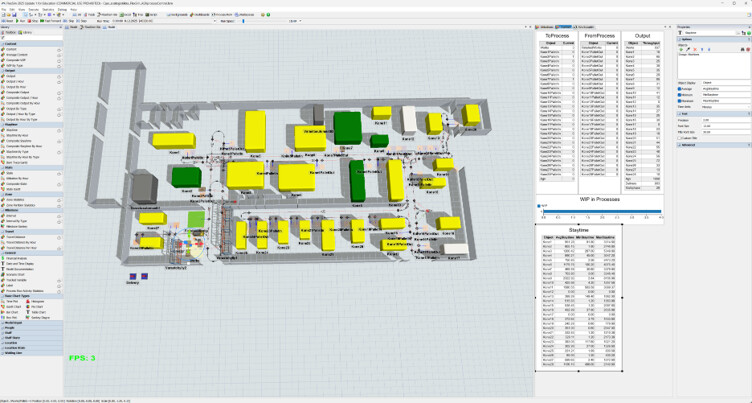
FlexSim -ohjelmistolla tehtiin visuaalisesti pelkistellympi simulaatiomalli, jolla pääsi nopeasti tutkimaan järjestelmän toimintaa. FlexSim -ohjelmisto mahdollisti myös nopeammin läpiajettavan simuloinnin, kun simuloinnin voi ajaa pikakelauksella loppuun ilman näytöllä näkyvää visuaalista simulointia.
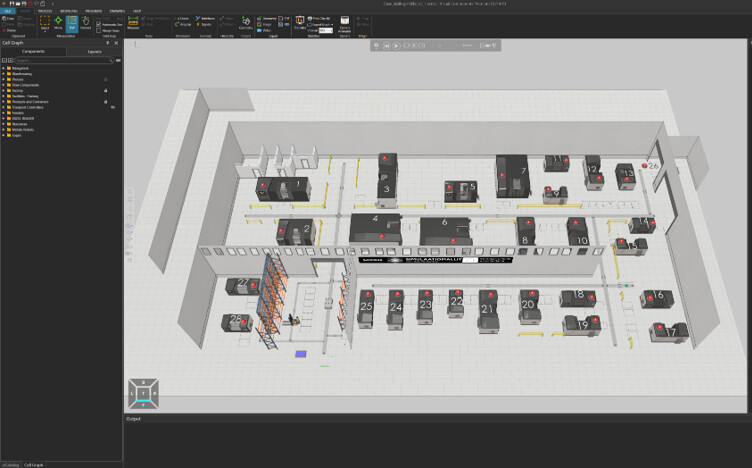
Visual Components -ohjelmistolla tehtiin realistisempi simulaatiomalli, jossa oli mahdollista tutkia mobiilirobottien toimintaa ahtailla käytävillä. Visual Components malli myös mahdollisti erilaisten mobiilirobottien testauksen ja logistiikan noutopisteiden tutkimisen.
Mallien luonnista ja sisällöstä voi lukea tarkemmin Savonian julkaisusarjan julkaisusta.
Tulokset
Simulaation tavoitteina oli tutkia mobiilirobottien soveltuvuutta yrityksen tuotannossa ja simuloida toimintaa todellisen lähtödatan avulla. Simulaation tavoitteena ei kuitenkaan ollut valita mobiilirobottia, vaan hakea rajoja mobiilirobotin valintaan liittyen. Näin ollen mobiilirobottien soveltuvuuden selvitys aloitettiin standardi tasolta.
Standardissa SFS-ISO 3691-4 on määritetty kuljettamattoman trukin turvallisuusvaatimukset, kuten mobiilirobotin suojaetäisyydet. Standardin mukaan mobiilirobotin sivujen turvaetäisyys on oltava vähintään 500 mm. Yrityksen layoutin mukaan käytävät ovat minimissään 2500 mm leveitä, jolloin standardin mukainen maksimileveys on 1500 mm. Huomioitavaa on, että maksimileveys koskee yhdistelmän kokonaisleveyttä. Mikäli mobiilirobotti on kapeampi kuin siirrettävä kuljetusalusta, on maksimileveyden määräävä tekijä siirrettävän kuljetusalustan leveys.
Simulaatioissa mobiilirobotteina testattiin haarukkavaunu tyyppisiä ja kuljetusalustan alle meneviä mobiilirobotteja. Haarukkavaunu tyyppiset mobiilirobotit mahdollistaisivat kuormalavojen helpon käsittelyn sekä nostot, mutta niiden heikkous on iso tilan tarve käytäville ja käännöksiin. Tästä syystä simuloinneissa käytettiin kuljetusalustan alle menevää mobiilirobottia.
Simulaatioista saatu mobiilirobotin käyttöaste jäi maltilliseksi, n.7-11% välille. Käyttöaste on yhdelle robotille, joten simulaatioiden mukaan yksi robotti riittäisi tuotannon käyttöön, ainakin pitemmällä aikavälillä tarkasteltuna.
Simulaatio-ohjelmistojen osalta havaittiin eroavaisuutta mobiilirobotin ohjauksissa, kun FlexSim simulaatiossa mobiilirobotin käyttöasteeksi muodostui 10 %yksikköä suurempi käyttöaste kuin Visual Components simulaatiossa. Myös matkaa FlexSim simulaatiossa kertyi lähes tuplasti Visual Components simulaatioon verrattuna. Tarkemmassa tarkastellessa havaittiin, että FlexSimissä mobiilirobotti tekee turhia lenkkejä määritetyillä reiteillä ennen kuin löytää oikean osoitteen.
Simulointien pohjalta esiin nousi tarve tutkia mobiilirobotin noutopisteiden määrän vaikutusta järjestelmän toimivuuteen. Tämän tarve havaittiin, kun annetussa lähtödatassa oli peräkkäisiä töitä samalle koneelle, jotka tukkivat yksittäisen noutopisteen ja estivät muiden töiden pääsyn tuotantoon. Tutkimusta tehtiin luomalla varastoon noutopisteitä ja simuloimalla niiden määrän ja rajoituksien vaikutusta tuotantoon. Käytettävissä olevan tilan pohjalta maksimimääräksi keräilypisteitä tuli 7 noutopistettä. Rajoituksina käytettiin kone/vaihekohtaisia rajoitteita.
Useiden simulaatio ajojen pohjalta parhaaksi ratkaisuksi osoittautui kaikkien 7 noutopisteen rajoitukseton käyttö.[HJ3.1] Tällöin noutopisteet eivät muodostuneet rajoittavaksi tekijäksi.
Loppusanat
Tapaus osoittaa, että simulointi auttaa tekemään näkyväksi asioita, joita on vaikea arvioida pelkän layout-kuvan tai yksittäisten tunnuslukujen perusteella. Mobiilirobotin käyttöaste voi näyttää riittävältä, mutta käytännön toteutuksen onnistuminen riippuu myös reiteistä, kääntymistiloista, noutopisteistä ja materiaalivirran ajoituksesta. Siksi simulointi on käyttökelpoinen työkalu erityisesti silloin, kun automaatioinvestointia suunnitellaan olemassa olevaan tuotantoympäristöön.
Tästä Simulaatiomalli teollisissa prosesseissa -hankkeen yritystapauksesta tarkemmin kertova yksityiskohtaisempi ja teknisempi toimintamalli on laadittu Savonian julkaisusarjaan, jonka voi lukea täältä:
Theseus linkki: https://www.theseus.fi/handle/10024/928378
Lisäksi kaikki simulaatiomallit ja lähtötiedot ovat saatavilla alla olevasta linkistä. Tiedostoissa on myös katselumallit, joiden katseluun voi ladata ilmaisen Visual Components Experience -ohjelmiston.
Sitepro – Case Tuotannon sisälogistiikka materiaalit linkki: https://drive.google.com/drive/folders/1rstdH9EO_uCSy_un6eh6T2lD3_7OEihB?usp=sharing
Kirjoittajat
Markus Kauppinen, Tutkimusinsinööri, Savonia-ammattikorkeakoulu
Artikkelin työstämisessä on hyödynnetty tekoälyä.