
Savonia-artikkeli: Kohti älykkäästi ohjautuvaa kaivinkonetta: kinematiikan rooli AI-MaSi-hankkeessa
This work is licensed under CC BY-SA 4.0![]()
![]()
![]()
AI-MaSi-hankkeessa pyritään kehittämään tekoälyn sekä koneoppimisen avulla itsestään ohjautuvaa kaivinkonetta. Hankeprojekti on Euroopan unionin osarahoittama. Hankkeen tuloksia ja havaintoja voidaan soveltaa käytännössä etenkin hydraulisten työkoneiden älykkään ohjaamisen kehittämiseen.
Hanketta tehdään kolmessa vaiheessa, simulaatiossa, pienoismallikaivinkoneella ja lopuksi Komatsu PC33E -sähkökaivinkoneella. Tällä hetkellä projekti on siirtymässä oikean kaivinkoneen ensitesteihin.
Hankkeessa liikutaan laajasti autonomisten työkoneiden kehittämisen ympärillä. Tässä artikkelissa keskitytään projektin yhteen keskeisimpään osa-alueeseen, kinematiikkapohjaiseen ohjausjärjestelmään, sen käyttötarkoitukseen sekä sen hyötyihin ja ongelmiin.

Mikä ihmeen kinematiikka?
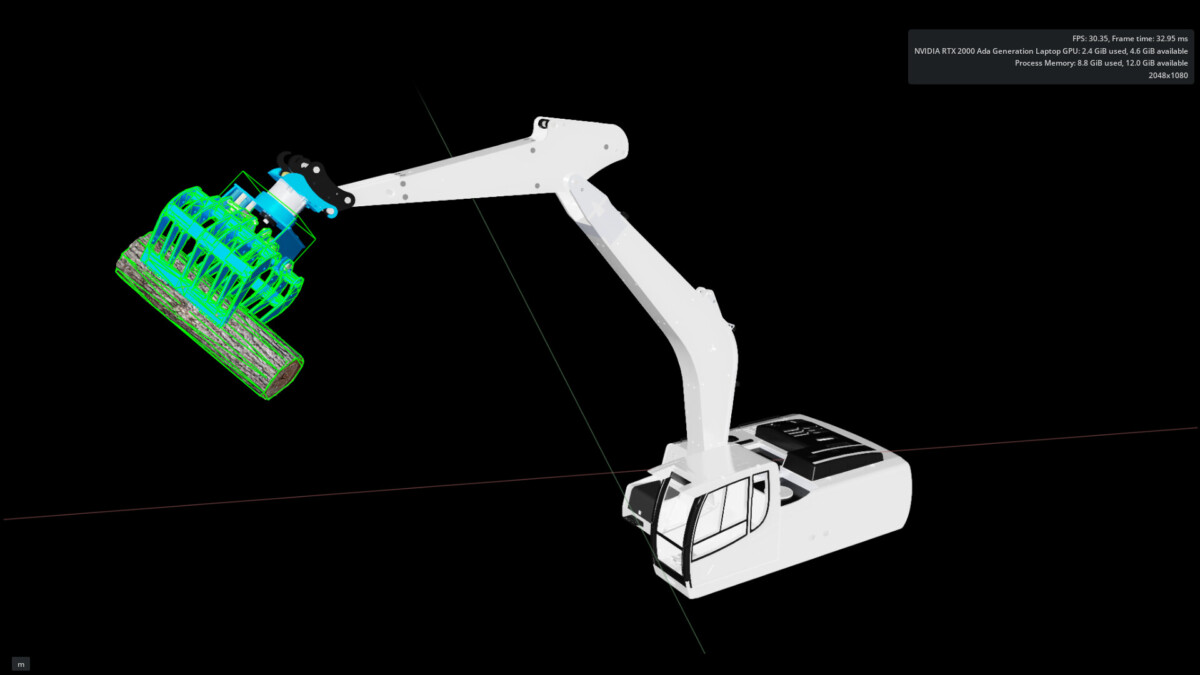
Kinemaattisen ohjauksen avulla sekä pienoismallikaivinkonetta että simulaatiokaivinkonetta kyetään ohjaamaan tavoitepisteiden avulla sekä digitaalisessa että fyysisessä ympäristössä. Kaivinkone pyrkii asettamaan kouran kärkipisteen kinematiikkaa käyttäen ympäristössä olevaan tavoitepisteeseen parhaansa mukaan.
Käytännössä robotille (esimerkiksi kaivinkoneelle) annetaan tavoitepiste maailmassa (XYZ-koordinaatistossa). Laskuri määrittää tavoitepisteiden avulla kaivurin vektorit (kaivurin puomit) sellaiseen asentoon, että viimeisen vektorin kärkipiste osuu tavoitepisteeseen. Toisin kuin käytännön tilanteessa, simulaatiossa kinematiikkalaskelman tavoitetulos voidaan toteuttaa täydellisesti. Tämä tarjoaa otollisen testausympäristön kinematiikan toiminnallisuuden testaamiseen.
Hankkeessa kaivurille suunniteltu kinematiikan laskentamoduuli toimii simulaation lisäksi myös tosielämässä, joten niiden antamia tuloksia voidaan vertailla rinnakkain.
Käytännön esimerkki
Esimerkkitapaukseksi voidaan ottaa kinematiikan sekä polunlaskenta-algoritmin yhdistelmä, jonka avulla kaivinkoneen kouraa ohjataan kahden pisteen välillä. Pisteiden välille asetetaan este, joka kouran tulee väistää. Kinematiikka huolehtii kaivurin puomiston viemisestä haluttuihin asentoihin, ja polunlaskenta-algoritmi laskee tavoitepisteet, joihin kouran tulee liikkua esteen väistämiseksi.
Simulaatiomaailmassa kaikki on täydellistä, kuten voidaan huomata videosta. Simulaatiokaivuri liikkuu paikasta toiseen mutkattomasti seuraamalla tavoitepisteitä. Fyysinen pienoiskaivuri sekin seuraa tavoitepisteitä, mutta epätäydellisesti. Reittiä seuratessaan fyysinen kaivuri saattaa nytkähdellä hieman.
Fyysisessä maailmassa hydrauliikkaan panostaminen on etusijalla, sillä pienoismallikaivurissa hydrauliikan monet pienet muuttujat saattavat vaikuttaa suuresti lopputulokseen.
Saadut tulokset ja havaitut ongelmat
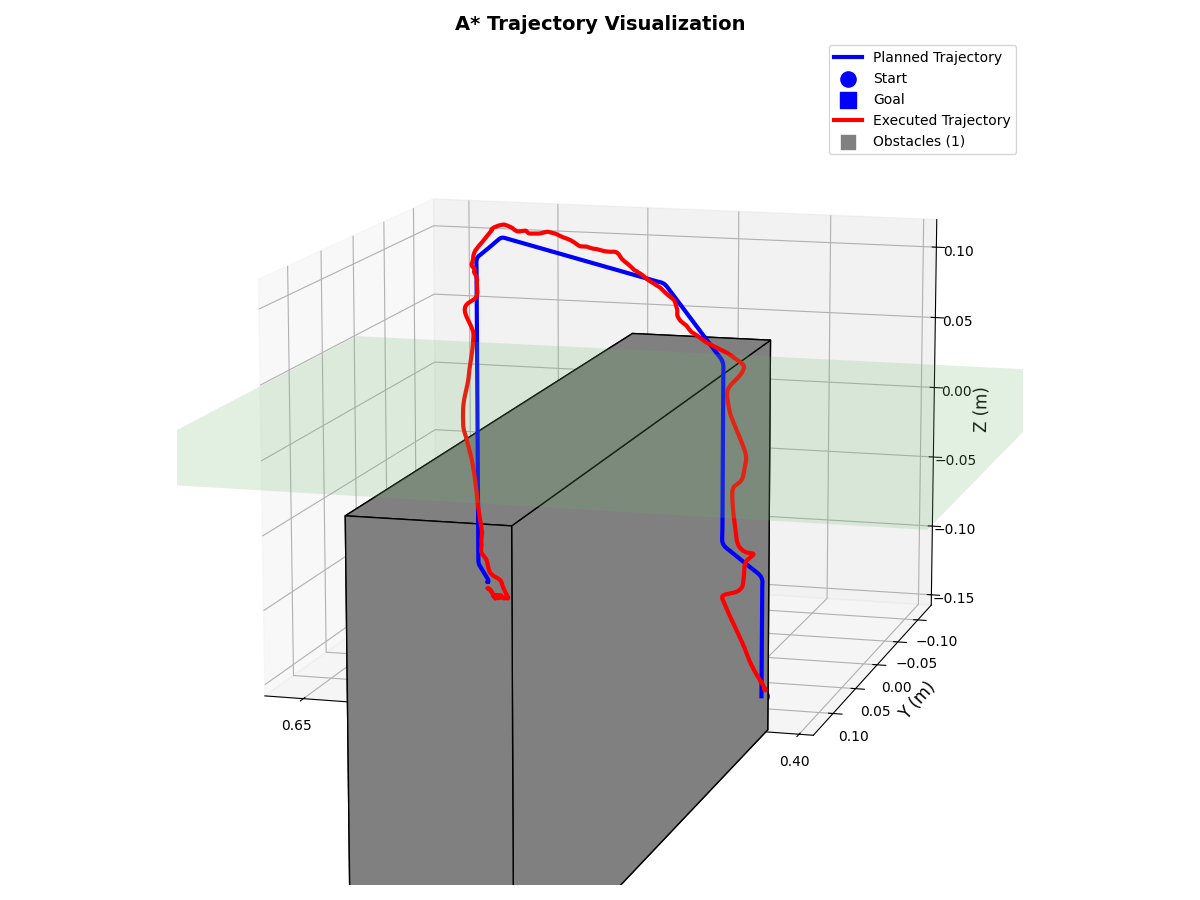
Yllä olevista tuloksista voidaan havaita eroja simulaation ja fyysisen kaivurin välillä.
Simulaatiokaivinkone kykenee seuraamaan tavoitepisteitä täydellisesti, sillä hydraulisen ohjauksen sijaan nivelten asentoja voidaan ohjata suoraan. Pienoismallikaivinkoneen ohjauksessa puolestaan joudutaan ottamaan huomioon lukuisia tekijöitä kuten esimerkiksi antureiden taustakohina, hydrauliikan epälineaarisuus, sekä sähköohjatun venttiilin viiveet.
Fyysisessä maailmassa nivelten täytyy tehdä yhteistyötä liikuttaakseen kärkipistettä, mutta kaikkia niveliä ei ole hydrauliikan rajoitteiden takia mahdollista liikuttaa samanaikaisesti halutulla liikenopeudella. Simulaatiossa tämä on kuitenkin mahdollista.
Vertaamalla pienoismallikaivurista ja simulaatiosta saatua dataa voidaan suoraan nähdä, missä epätäydellisyyksiä on ja mitä seuraavaksi tulisi parantaa.
Yksi suurimmista vaikuttavista tekijöistä on hydrauliikan ristivaikutus. Tässä yhteydessä ristivaikutuksella tarkoitetaan nivelten ohjauksen muutosta sen mukaan, kuinka montaa niveltä ohjataan samanaikaisesti. Pumppu tuottaa tasaisen määrän öljyn virtausta, joka jaetaan kolmen sylinterin kesken. Virtaus ei kuitenkaan jakaudu tasaisesti, vaan muun muassa painovoima, ohjatun puomin massa ja geometria, sekä systeemin sisäiset vastukset vaikuttavat virtauksen määrään. Tämä efekti on nähtävissä selkeästi etenkin, kun kaivuri pyrkii liikkumaan tasaisesti X-akselilla (vaakatasossa).
Lisäksi sähköohjatun venttiilin käskyn ja toteuman välillä on viivettä. Vähentämällä ristivaikutuksen ja toteuman viiveen vaikutusta saadaan merkittävästi kasvatettua pienoismallikaivurin suorituskykyä.
Kinematiikan soveltaminen jatkossa
Pienoismallikaivuri ei ole täydellinen, mutta datan avulla simulaation ja tosielämän välisiä eroja voidaan tuoda lähemmäksi toisiaan.
Tämän datan pohjalta luodaan simulaatioon malli, joka matkii fyysisen kaivurin epätäydellisyyksiä. Samalla simulaatiosta hankittua “täydellistä” dataa pyritään kopioimaan fyysisesti pienoismallikaivurilla.
Pienoismallikaivureilla saadut tulokset ja kokeilut pystytään siirtämään oikean kokoluokan kaivinkoneeseen suhteellisen vähällä vaivalla. Se tarkoittaa, että samoja testejä voidaan toteuttaa myös suuren kokoluokan kaivinkoneella.
Suunnitteilla on rakentaa 3D-malli, joka vastaa isomman kaivurin mittoja. Simulaatiossa 3D-mallia voidaan kokeilla turvallisesti, “bugeja” voidaan tutkia ja ongelmia karsia. Sen avulla potentiaalisesti keskeneräistä ohjelmakokonaisuutta ei tarvitse suoraan tutkia järeällä kaivurilla. Simulaatiomaailma tarjoaa turvallisen, otollisen tutkimusympäristön, jossa kokeilla kaivurin rajoja ja testata uusia asioita riskittömästi.
Kirjoittaja:
Jonna Kokkonen, viestintäharjoittelija, Savonia-ammattikorkeakoulu
Eetu Miettinen, tutkimusinsinööri, Savonia-ammattikorkeakoulu
